
")
ROVER-TRACKING Task Types
![]()
Land Rover meetings are excellent opportunities for drivers to test their skills. The Rover-tracking system and application helps these events with automatic scoring. The organizers announce different tasks for the events.Previously, during the races, the pilots and navigators usually received the tasks of the race on worksheets and wrote down their positions and results on the track. The organizers had to process this afterwards.
This system provides a variety of useful tools for competitors, organizers and spectators.
In the Rover-tracking system the automatic scoring module works!
AST / MST - Measuring results for scoring
There are 13 types of built-in tasks in Rover-tracking, where our unique scoring module automatically performs scoring, based on the GPS position of the competitors, their marked waypoints - flag placements - and continuously calculates the current ranking of the competition. These are the AST: Automatically Scored Tasks. Competitors, judges, and spectators can see the current ranking in real time during the races on the event's website.
There are tasks that are not evaluated based on the GPS position and flag placement. This could be, for example, a skill oriented track race, an assembly task, a parts identification task, a car beauty contest, etc. These are MST: Measured and Scored Tasks.
For such tasks, the jury monitors the competition and records the results in the application. If this is done properly, then the Rover-tracking system will calculate the scores automatically. For the competitor whose points have already been recorded by the jury, the result of the task is included in the result table and affects the current order of the competition.
What are the potential tasks for a competition?
During a competition day, the event director often declares several different tasks for the competitiors. These fall into the following two major cathegories:
1.1 - 1.9 Precision Navigation, and skill-testing tasks without time measuring or time limits
2.1 - 2.8 Speed, Distance or skill tasks with time measurement
Get to know the BUILT IN TASK modules of rover-tracking!
1.1 PDG
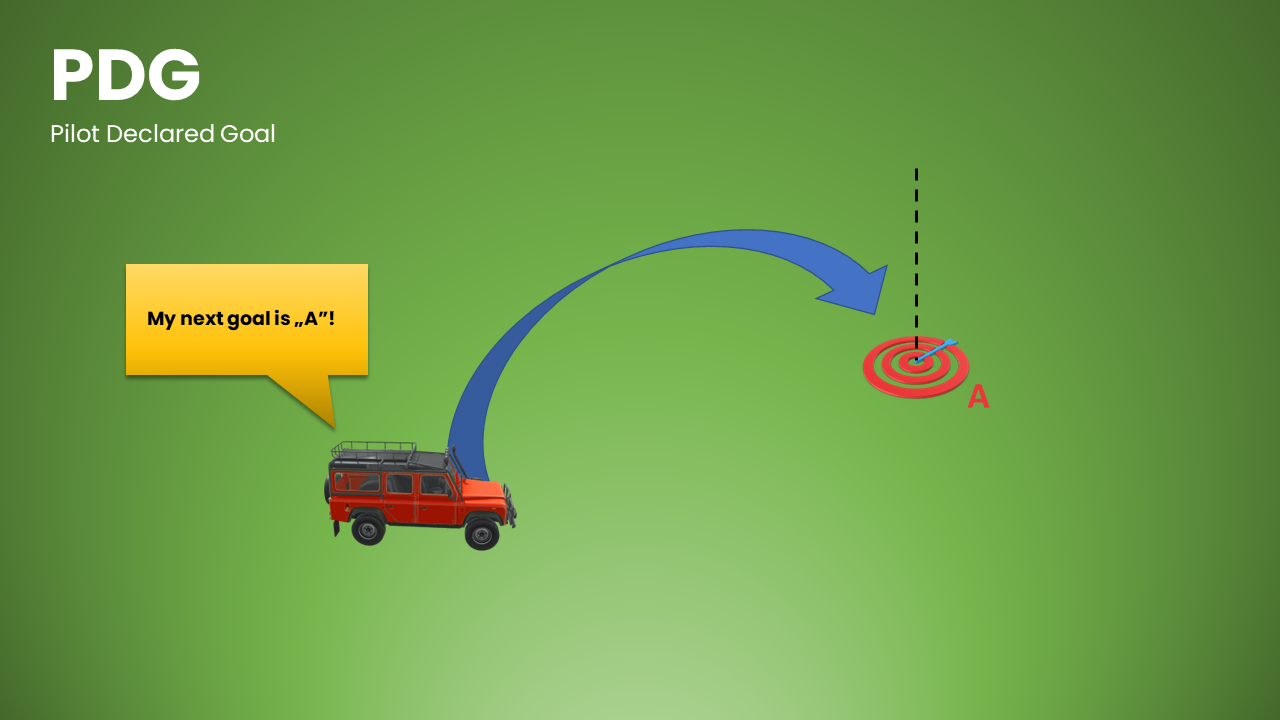 1.1 PDG - Pilot Declared Goal
1.1 PDG - Pilot Declared Goal
AST: Automatically Scored Task
Competitors attempt to Mark their own declared goal with a Flag. This target is usually a characteristic landmark, a road crossing, bridge, etc.
The Declaration can be subject to conditions (Minimum distance from a defined location, time relative to the event, etc.) For this task, if the Pilot successfully marks a flag within the distance defined in the Rules (e.g. 5-10 m), then the task is completed. The Pilot gets the Flag Point for the task.
1.2 JDG
 1.2 JDG - Judge Declared Goal
1.2 JDG - Judge Declared Goal
AST: Automatically Scored Task
Competitors attempt to mark a flag next to the goal designated by the competition judge. For this task, if the Pilot marks the flag within the distance specified in the Rules (e.g. 5-10 m), then the task is completed, and the Pilot gets the Flag Point for the task.
This task is easy to understand for the audience and can be a very spectacular one, as each competitor goes to the same Target to mark their flags.
In relation to this task, the distance traveled by the competitor and the time required to do so might be a factor during evaluation.
1.3 HWZ
 1.3 HWZ Hesitation Walz
1.3 HWZ Hesitation Walz
AST: Automatically Scored Task
Competitor’s goal is to mark a flag at the targets designated by the judge. It is not mandatory to mark a flag for every target, but successfully doing so earns the Pilot a Flag Point.
There might be a score difference between the individual Targets, meaning that some flags worth more Flag Points. In this task, all the flags are counted as the sum of the points earned by marking them. If the Pilot marks a flag within the distance specified in the Rules (e.g. 5-10 m), then he/she has completed that Target and receives the corresponding Flag Point. The Task Result is given by the total amount of Flag Points gathered during the task.
There are usually more Targets than can be successfully reached in the time available. Pilots should carefully plan their strategy considering the difficulties of the terrain.
In relation to the task, the route taken by the competitor is logged and this can be a factor in the evaluation.
1.4 RTS
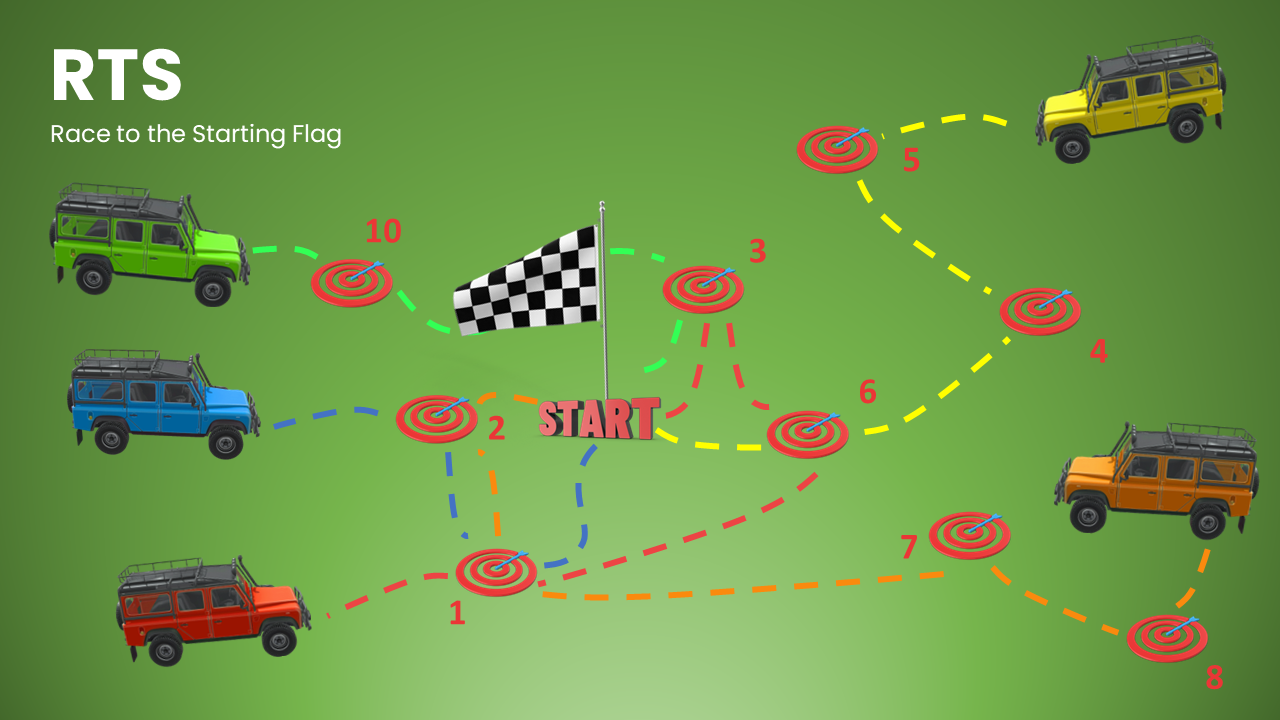 1.4 RTS - Race to the Starting Flag
1.4 RTS - Race to the Starting Flag
AST: Automatically Scored Task
This is typically a task for the competitors on the first day of the competition, similar to HWZ. The race director designates several Targets in the vicinity of the Base, considering the approach routes of the competitors, and defines the latest time to arrive at the base of the competition. The Pilots who arrive to the event compete already when they start their trip to the event. They signal their Start electronically with the Start button.
The more Targets they mark during their trip to the event, the more Flag Points they get. This task already makes the journey a spectacle that anyone can follow online at Rover-tracking.com. It can be broadcast with a projector at the venue of the competition.
In relation to the task, the distance traveled by the competitor and the time required to do so might be a factor in the evaluation.
1.5 AUG
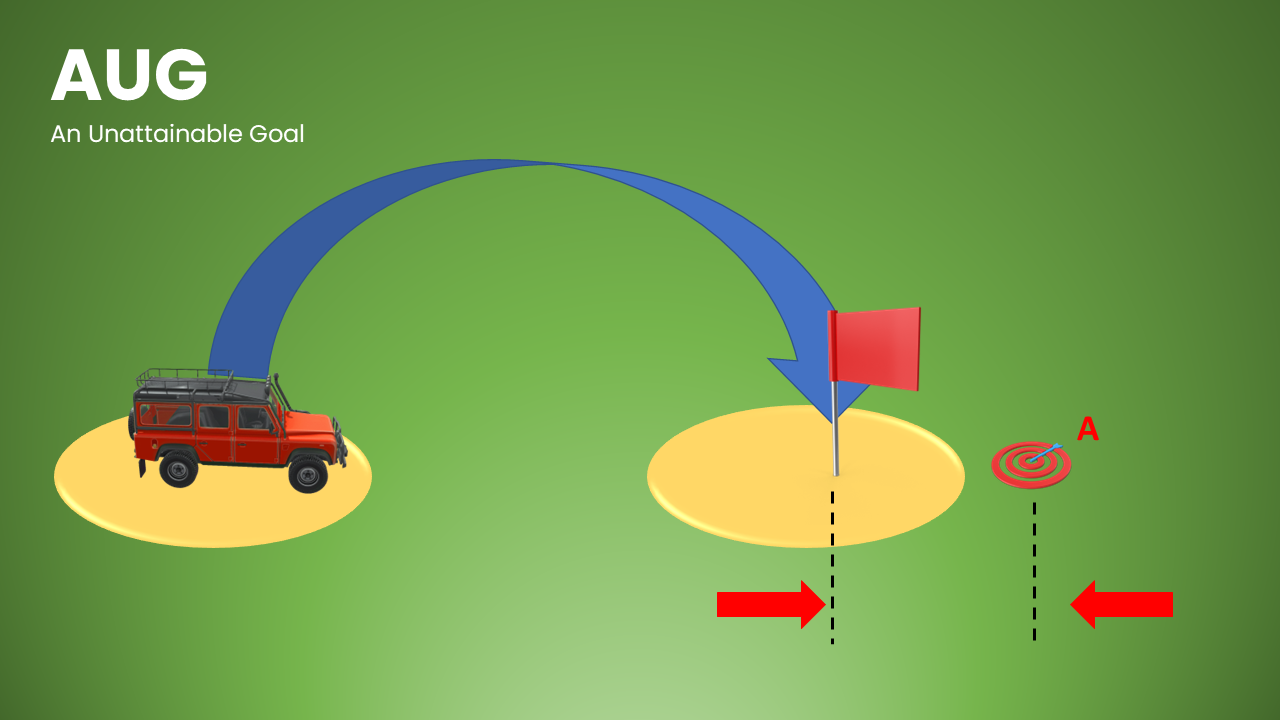 1.5 AUG - An Unattainable Goal
1.5 AUG - An Unattainable Goal
AST: Automatically Scored Task
Similar to the JDG (Judge Declared Goal) task, a Target is designated with a MMA (Marker Measuring Area) nearby.
In this case, the target is outside the MMA: It can be in an actually inaccessible place (in the middle of a lake, in a swamp, or even at a virtual point above the ground), or it can be "fenced" with a designated virtual protective distance (PZ - Prohibited Zone). The border of the MMA can be a real physical border (e.g. a lake, the bank of a river marsh, a clearing in the middle of a forest, etc.) or a virtual one.
The goal of the Competitors are to mark their flags inside the MMA as close to the Target as possible. Here, the Pilots should also consider which point of the MMA is closest to the Target, as well as how, and how fast they can approach that point - taking into account the location of the previous and next Targets as well!
Scoring: We measure the distance between each competitor's Flag and the Target, this is the Result, and we put them in ascending order, closest is best.
In relation to the task, the distance traveled by the competitor and the time required to do so might be a factor during evaluation.
1.6 FXH
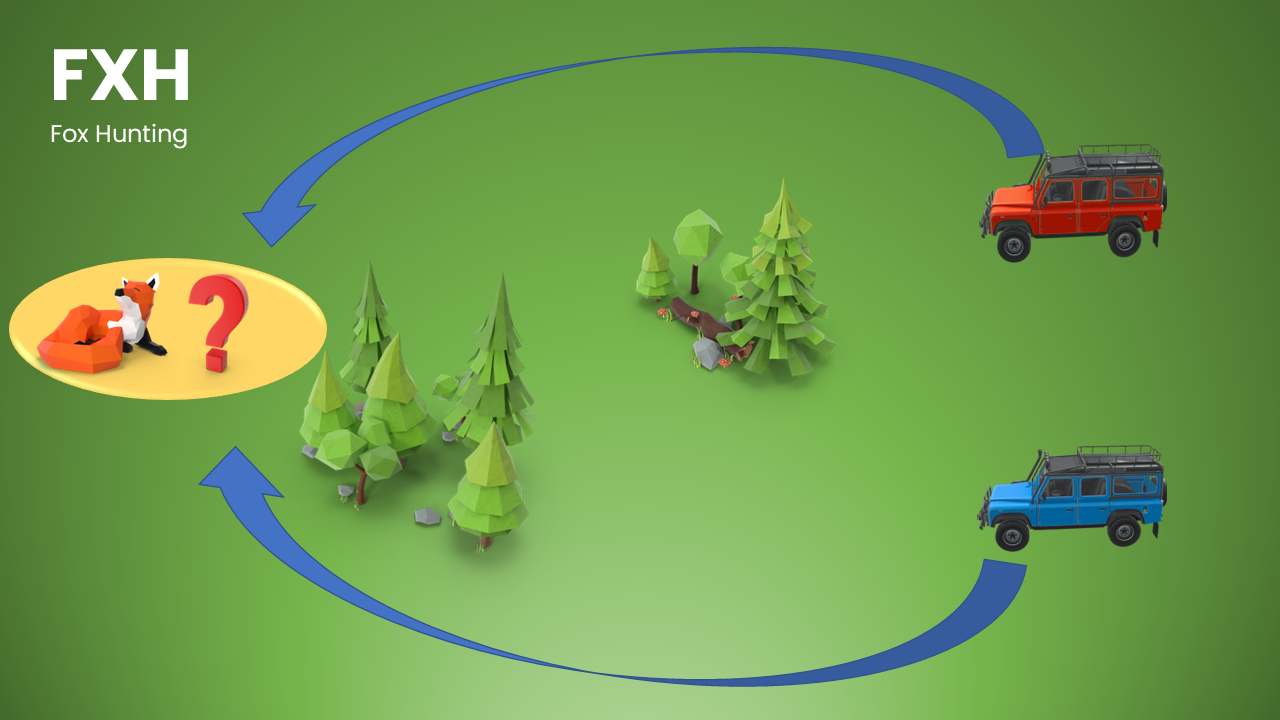 1.6. FXH - Fox Hunt
1.6. FXH - Fox Hunt
AST: Automatically Scored Task
In this task, the contestant’s goal is to find the hiding fox within a designated area. On the screen, the target area is known, but the fox's hiding place is hidden.
When the Driver approaches the area and the fox is within 500 meters, a window will appear on the application screen showing the distance of the Fox from the Driver. However, the direction and exact location is still unknown!
When moving around the area, the contestants must pay attention to whether they are moving away from, or approaching the fox's hiding place based on the displayed distance.
The goal is to place a flag as close to the hiding fox as possible. The closer it is, the more pint the pilot gets.
1.7 RWT
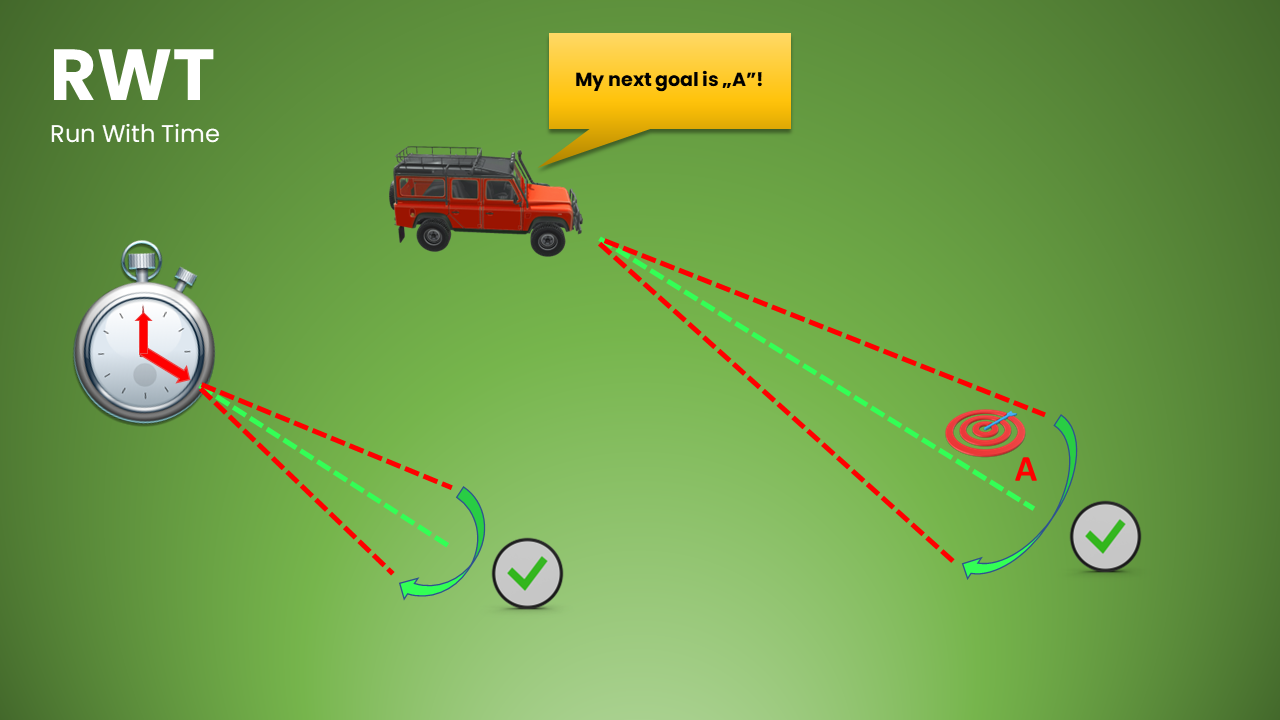 1.7. RWT - Run With Time
1.7. RWT - Run With Time
AST: Automatically Scored Task
The task is similar to the PDG (Pilot Declared Goal), but the validity of the goal is affected by the time of declaration.
The Pilot must watch the clock, he/she can only declare a valid target for his own location in the direction that falls in the direction of the minute hand of the clock. The Event Rules also record the deviation from this direction (e.g.: +/- 3-5 degrees) and the minimum distance.
This task offers an excellent solution if the Event director wants to disperse the competitors on the field after the start. This way, competitors starting one after the other start in different directions on the field, no convoy of competing cars gets formed.
1.8 TWT
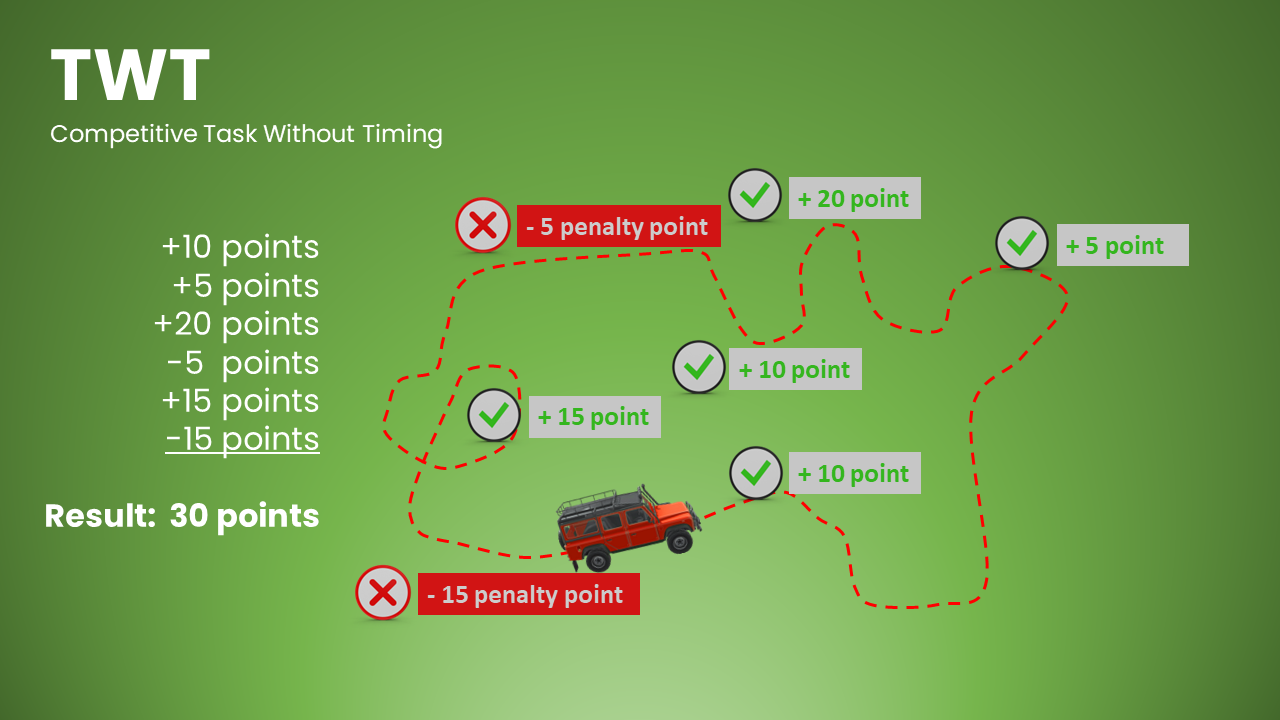 1.8. TWT - competitive Task Without Timing
1.8. TWT - competitive Task Without Timing
MST– Measured and Scored Task
This task is typically an untimed Skill Course, where the less errors or mistakes worth more points.
Even though we do not rank the competitors in this task by their time taken, a time limit can be associated with the task (e.g. only 15 minutes) If a priority part of the task named on a TDS (Task Data Sheet) is not met, the competitor gets No Result.
1.9 MDDF
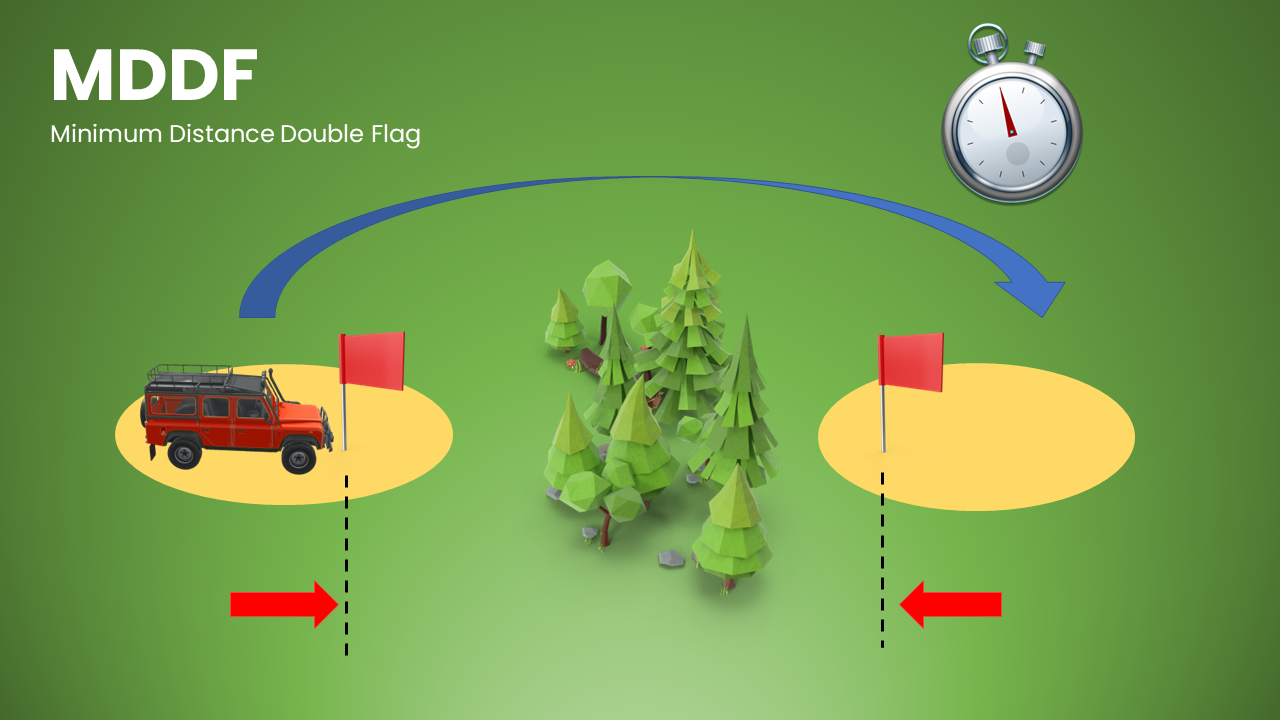 1.9 MDDF - Minimum Distance Double Flag
1.9 MDDF - Minimum Distance Double Flag
AST: Automatically Scored Task
Competitor’s goal is to make two flag marks in two different measuring areas. The task is only valid if both flags are inside the different measurement areas! A smaller distance between the flags earns more points.
The measurement areas are usually designated in such a way that the approach from one area to another is difficult (separated by a forest, river, marsh, or PZ - Prohibited Zone).
Upon reaching the other measuring area belonging to this task, the Driver marks the pair of his/her first flag. It is possible that the contestant has to perform different tasks after marking his/her first flag, before reaching the second measuring area. If he/she forgets it or does not reach the second measurement area during the race, the first flag is lost and no points are scored for this task.
2.0 SSP
2.0 SSP -Spread-out from Starting Point
MST– Measured and Scored Task
The goal of this task is to spread out the competitiors, to prevent the formation of groups, if it is an important aspect of the competition. This task is the first in such an event.
The Competitors have to place a flag at one of the previously know targets (e.g: East-North-West-South). The information of which target will be valid for any given competitor is only announced at the start of the race. A Measuring Team member records this information, and the scoring module will handle this task as well.
2.1 XDDT
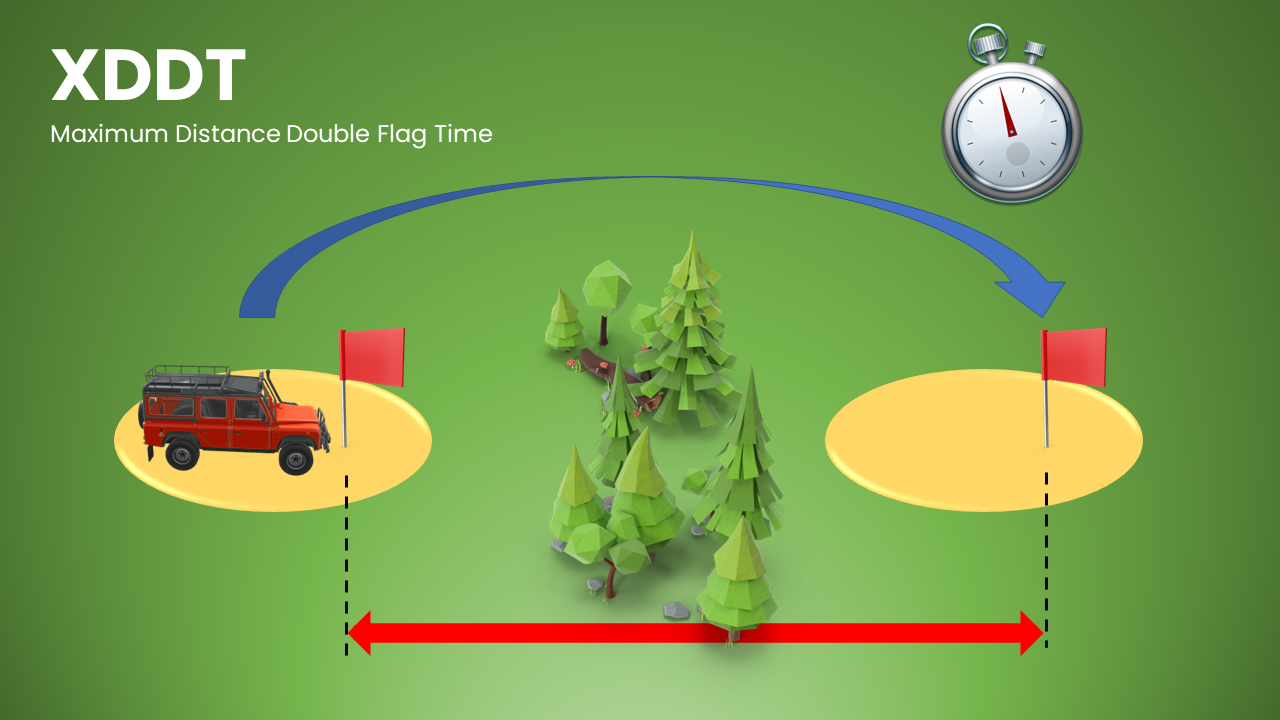 2.1 XDDT - Maximum Distance Double flag Time
2.1 XDDT - Maximum Distance Double flag Time
AST: Automatically Scored Task
There are two separate MMAs (Marker Measuring Areas) designated where flags should be marked, with a time limit, starting after the first flag marking is made. The greater distance between the two flags earns more points, if someone runs out of time or one of their flags is not in the correct MMA, the task is invalid.
2.2 XDT
 2.2 XDT - Maximum Distance Time
2.2 XDT - Maximum Distance Time
AST: Automatically Scored Task
The Driver’s goal is to get as far as possible (from the starting point) in the given time. This task can also be one where we automatically measure where the Driver is after x time has passed and how far this waypoint is from the starting point.
SLZ (Speed Limit Zone) and PZ (Prohibited Zone) can be assigned, violation of these zones causes Penalty Points.
2.3 RTA
 2.3 RTA Race To Area
2.3 RTA Race To Area
AST: Automatically scored task
The goal of this task is to reach an MMA (Marker Measuring Area) as quickly as possible and then mark a flag there. Whoever is the fastest gets the most points.
As with other races, speed (elapsed time) and performance is tested. During the task SLZ (Speed Limit Zone) and PZ (prohibited Zone) might be designated.
The time limit to the task might start
-
- at an exact designated time
- automatically after the previous Target when the corresponding Flag ismarked
- or by the Start Button on the app of the Driver (conditions might apply, e.g. max/min distance from something, etc.)
2.4 CRAT
 2.4 CRAT - Calculated Rate Approach Task
2.4 CRAT - Calculated Rate Approach Task
AST - Automatically Scored Task
Similar to the JDG (Judge Declared Goal) task, competitors mark a flag on the Target in the specified Marker Measurement Area, but they only have a limited time period to do so. A competitor will not receive points if he/she marks the flag too early or too late.
2.5 LRNT
2.5 LRNT Land Run Time
AST: Automatically Scored Task
The goal of this task is to cover an area, by marking it with Four Flags. The available time can start individually by the Pilot for this task with the first flag, or at a designated time.
Larger area worths more points.
Conditions can be set for individual flags (minimum distance between flags, one or more flags must be in the measurement area, etc.)
2.6 LTX

2.6 LTX - Longest Track
AST: Automatically Scored Task
The goal of this task is to take the longest route possible in the marked area, during the time available. These areas can be segmented (Donuts, concentric circles, enclosed inner areas, etc.).
It is possible that a passed route within a territory worth more points than in another territory. The organizer can pre-set modification multipliers for the defined areas. This information is also described in the TDS (Task Data Sheet).
2.7 CTT
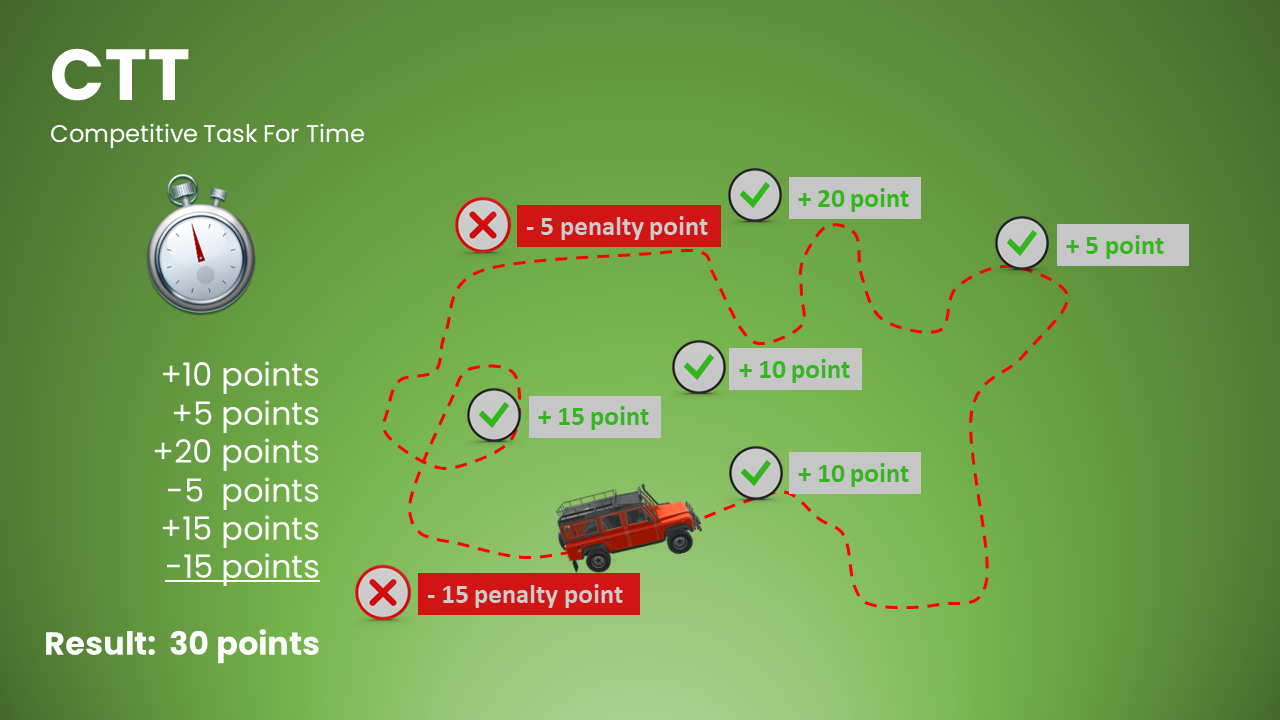
2.7 CTT Competitive Task for Time
MST– Measured and Scored Task
Competitors perform the tasks described in the TDS (Task Data Sheet).
Meanwhile, the Measuring Team measures time, task results, or lap times, and records fault and bonus points.
The driver who completes the tasks in the shortest time gets the most points (considering bonus and penalty points for the Task).
2.8 CST
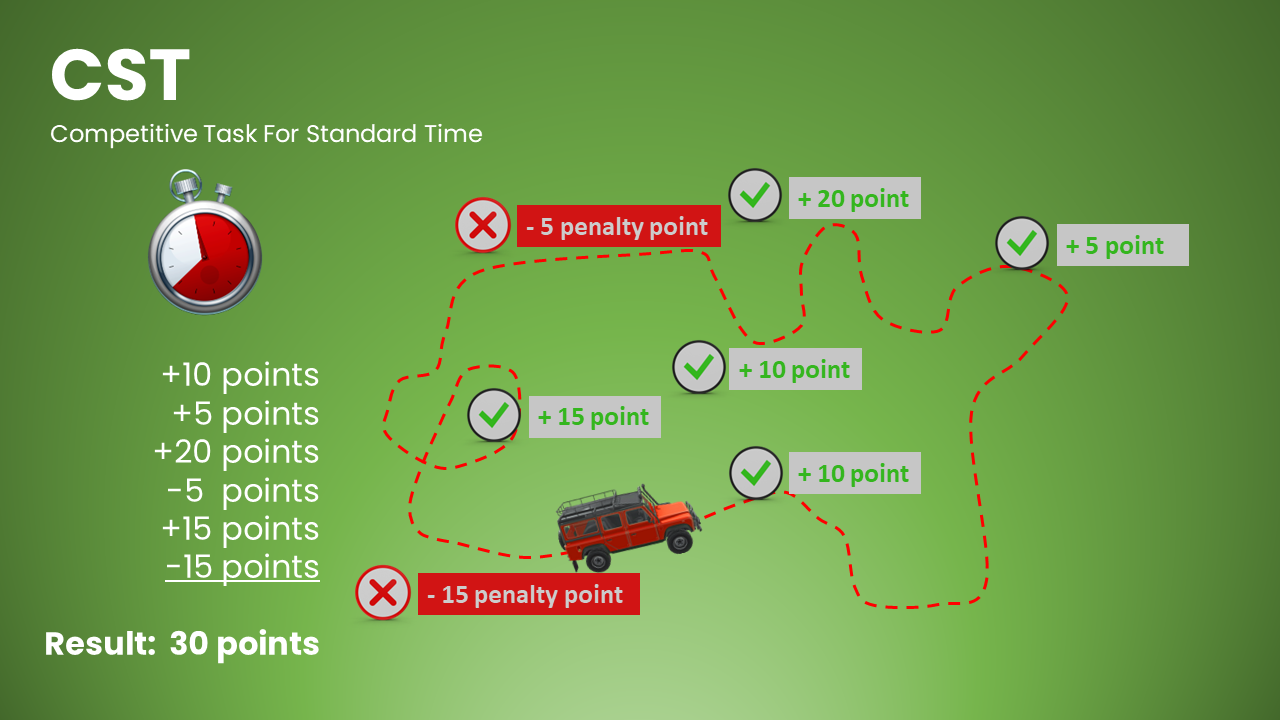 2.8 CST Competition task for Standard Time
2.8 CST Competition task for Standard Time
MST– Measured and Scored Task
Competitors perform the tasks described in the TDS (Task Data Sheet).
Meanwhile, the Measuring Team measures time, task results, or lap times, and records faults and bonus points.
The Driver who completes the tasks closest to the predetermined Standard time gets the most points (considering bonus and penalty points for the Task).
